コロナ蔓延により 優位性増すクラウド
本稿は2018年8月の記事で、クラウドとオンプレミスを項目別に評価(下表参照)しています。同表内のBCPの項ではクラウド(AWS/FMC)が優位にありますが、昨年の台風19号や今回のコロナの蔓延により、各企業・団体でのBCPの"重み"は急激に増しています。インフラ構築とその運用をすべてリモートで行えるAWS等のクラウドは、テレワーク/在宅勤務の観点からも優位です。
土屋企画では、FileMakerシステムの移行を含むAWSインフラ及びテレワークシステムの構築を支援・実施致します。
参考リンク(土屋企画のWebサイト):
■AWSとテレワーク
■リモート開発とテレワーク
■Amazon connect と FileMaker WebDirect による CIT の無料試用サービスについて
(2020年5月1日加筆)
ローカル → EC2 vs ローカル→Workspaces→EC2
~ FileMakerクライアントの実行速度を比べる ~
Amazon Connect と FileMaker WebDirect 19 による CTI
Amazon Connect と FileMaker WebDirect 19 を連携させ、 CTI(Computer Telephony Integration) の主要機能の1つである「着信時顧客情報ポップアップ」を実現する事例をご紹介します。
(2020年6月15日加筆)
(以下、本文)
2017年7 月の FileMaker Cloud リリース以来、FileMaker Server のクラウド環境での運用も増えているようです。これにより企業では FileMaker Server 導入時に、オンプレミス(自社サーバ)、AWS EC2(Amazon社が提供するクラウドサービスで、ユーザは 自身で適切な Windows OS を選択て、FileMaker Server のインストールを行う)、FileMaker Cloud(FileMaker 社が Amazon マーケットプレースで提供する AWS EC2上で稼働する FileMaker Server プラットフォーム)の 3 つのプラットフォームから選択することになります。
ユーザはこれら3つのサービスでどれが自社に最適なのか悩むところですが、結論的なことを先に言ってしまうと、システム担当者がいない会社では FileMaker Cloud がお勧めです。FileMaker社が提供するチュートリアルに沿って設定を行えば、通常は数十分で FileMaker Server の準備が完了します。従来からある素の AWS EC2 に比べると、FileMaker Cloud は簡単です。
オンプレミスかクラウドかはほとんどの場合、企業・組織がもつサーバポリシーによりほぼ自動的に決まってしまうかと思われます。データの秘匿性、セキュリティを重視する会社ではクラウド自身を禁止しているところもありますし、基幹システムはオンプレミスで、その他はクラウドに出すところ、IT部門の人員を削減するためサーバは全てクラウドにするところもあります。逆にサーバの仮想化をすすめ自社のサーバ室ですべてを運用することによりコストダウンを図る会社もあります(当社はこの形態に近いです)。
本稿では、オンプレミス、AWS EC2、FileMaker Cloud の3つのプラットフォームを機能面と費用面から比較しています。機能については項目別に点数をつけていますが、企業・組織により各項目の重みは大きく異なるので、点数は参考値としてご覧ください。
なお、3者とも FileMaker Server 17 の年間ライセンスを 25 使用することを前提としています。また、FileMaker Cloud はラインセンスのクラウドへの持ち込み(Bring Your Own License: BYOL)を前提としています。
始めに機能・運用環境を比較してみます。FileMaker 社の公式ページ FileMaker ServerとFileMaker Cloudの比較 をベースに、さらに検討が必要と思われる項目を追加し、オンプレミス、AWS EC2、FileMaker Cloud 別に点数をつけてみました。
| No | 比較項目 | オンプレミス (OP) |
AWS EC2 (AWS) |
FileMaker
Cloud (FMC) |
説明 |
|---|---|---|---|---|---|
| 1 | 初期費用(ハード/ソフト) | 1 | 5 | 5 | 表2参照 |
| 2 | 運用費用(ハード/ソフト) |
4
|
3
|
2
|
表2及び表3参照 |
| 3 | ハードウェア導入時の手間 |
2
|
4
|
4
|
OP:ハードウェア/UPS/バックアップ機器等の選定と購入が面倒 AWS:インスタンスタイプの選定のみ。OPに比べ簡単 FMC:インスタンスタイプの選定のみ。OPに比べ簡単 |
| 4 | OS(選定/インストール/設定) |
2
|
4
|
5
|
OP:自社で
OS の選定、インストール、各種設定が必要 AWS:OSの選択は必要だが、インストールは不要 FMC: OS 選定もインストールも不要 |
| 5 | FileMaker Server セットアップ |
2
|
3
|
5
|
OP:自社ですべて行うため時間と労力がかかる AWS:同上 FMC:20分程度(他に比べ簡単) |
| 6 | FileMakerライセンスの柔軟性 |
3
|
3
|
2
|
OP/AWS:自社で
FMS ライセンスを用意する必要あり FMC:AWS MarketPlace から BYOL、またはライセンス込みの FMC オプションを 選択可能。 AWS のユーザ登録とサーバ(EC2)、ストレージ(EBS)の指定が必要。 詳しくはFileMaker Cloud の購入方法を参照。 |
| 7 | OS・ハードウェアの監視・管理 |
2
|
4
|
5
|
OP:社内担当者の負担大。 AWS:OS等ソフトウェアは社内担当者が管理、ハードウェアはAmazonにお任せ。 FMC:社内担当者の負担は最小。FMC 側でリアルタイム監視、OS更新通知、ソフトウェアパッチの自動通知 |
| 8 | バックアップ |
5
|
5
|
1
|
OP/AWS:サーバ管理者が計画、設定を行う必要があるが、バックアップスケジュールを自由に設定でき、単独ファイルのバックアップ、フルバックアップ等、柔軟な設計が可能。 FMC:FMC 側で自動メンテナンスを有効にすることによって自動バックアップ可能だが、サーバ環境の AWS スナップショットとなるため、バックアップスケジュールの柔軟性は低い。 FileMaker Cloud のバックアップの操作 を参照。 AWSスナップショットのバックアップはデフォルトで 20分ごとに実行される。一週間で計 504個のバックアップが保持され、古いものから順次自動削除される。よって、一週間より前のバックアップが必要な場合、他のバックアップ方法が必要となる。 バックアップのリストアは EBS ボリュームにスナップショットをアタッチする。ファイル単位の復旧は面倒(関連記事:FileMaker Cloud and Manual Backup Restore(英語))。 |
| 9 | スケーラビリティ |
2
|
4
|
4
|
OP:非仮想化環境の場合、ストレージ/メモリ/コア数の拡張には物理サーバ等のハードの入れ替えが伴うが、仮想マシンであれば拡張は容易で、費用は発生しない。 AWS/FMC:ストレジの拡張、サーバのアップグレードはオンラインで行えるが、拡張すれば運用コストもアップする。 |
| 10 | 最大アクセス数(FM社検証値) |
5
|
5
|
3
|
OP/AWS:最大500
同時アクセス FMC: 最大 100 同時アクセス |
| 11 | アップタイム(継続稼働) |
3
|
4
|
4
|
OP:会社のポリシーと管理者の力量に依存。 AWS/FMC:99.99% のアップタイム(理論値と思われる。表外のコラム参照。 |
| 12 | BCP(災害時復旧) |
2
|
4
|
4
|
OP:災害被災時は焼失等により復旧不能となる可能性あり。同時被災の可能性が少ない遠隔地ストレージへのバックアップが推奨される。 AWS/FMC:OPに比べ影響を受ける可能性は少ないと思われるが、被災可能性は無いとは言えない。 |
| 13 | ネットワーク |
5
|
3
|
3
|
OP:LAN専用の場合、インターネット環境に影響されない。WANの場合は回線品質に依存する。 AWS/FMC:インターネット接続必須。実行速度はAWSのインスタンスタイプに加え、自社が使用する回線品質にも依存する。OPに比べ、WANの構築は容易。 |
| 14 | サーバ証明書 |
3
|
3
|
3
|
OP/AWS:自前の証明書をインストールする必要あり FMC:Comodoの試用版SSL証明書が付属(90日) |
| 15 | サーバ認証 |
4
|
4
|
3
|
OP/AWS:FileMaker
ユーザアカウント認証、Active Directory/Open Directory および OAuth 2.0
アイデンティティプロバイダを使用した外部認証 FMC:FileMaker ユーザアカウント認証、 OAuth 2.0 アイデンティティプロバイダを使用した外部認証 |
| 16 | サーバサイドスクリプト |
5
|
5
|
2
|
OP/AWS:サーバ管理者が計画、スケジュール設定 FMC:スケジュール機能は限定的 |
| 17 | ESS |
5
|
5
|
2
|
OP/AWS:ESS使用可 FMC:ESSアダプタ以外は ESS 使用可 |
| 18 | ODBC/JDBC |
5
|
5
|
4
|
OP/AWS:ドライバのインストールが必要 FMC:ドライバのインストールが必要、専用ドライバの提供あり |
| 19 | プラグイン |
5
|
5
|
3
|
OP/AWS:使用可能 FMC:一部対応していないものがある可能性あり |
| 20 | カスタムWeb with PHPおよびXML |
5
|
5
|
-
|
OP/AWS:使用可能 FMC:使用不可 |
| 21 | FileMaker Data API |
3
|
3
|
3
|
OP/AWS:使用可能 FMC:使用不可 注: 本機能は1ライセンスあたり年間24GB のアウトバウンド転送量が付属するが、この転送量を超過するとライセンスを追加購入するが必要ある |
| 土屋企画評価 |
73
|
86
|
67
| ||
2019年8月14日、DNS の問題により、FileMaker Cloud for AWS にアクセスできない問題が発生しました。
FileMaker Cloud の DNS障害について [FileMaker Community]
2019年8月23日、AWSの東京リージョンで大規模な障害が発生しました。
2019年8月23日、AWSの東京リージョンで大規模な障害が発生しました。
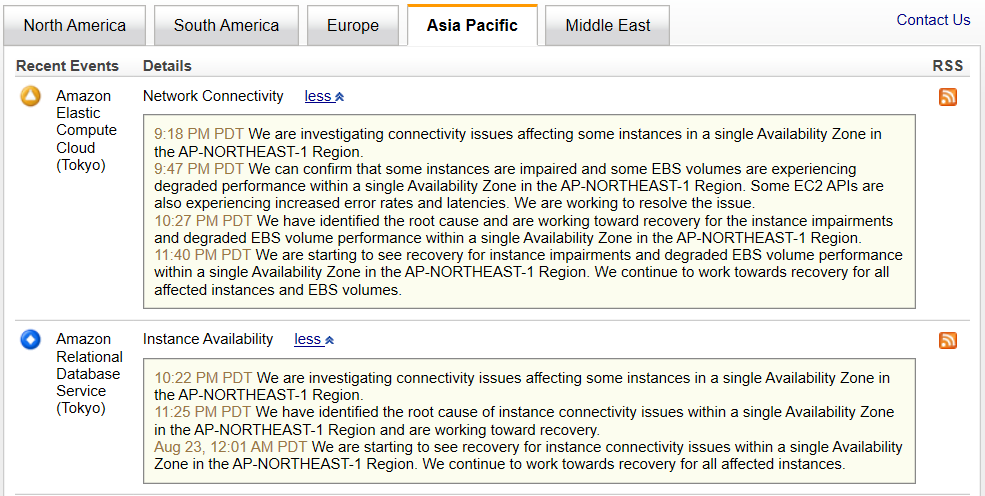
同日17時現在、当方で利用している東京リージョンの AWS EC2 にはアクセスできましたが、AWSの Service Health Dashboard をみると、まだ完全復旧はしていないようです。9時~17時までの8時間、システムが停止している会社もあるかも知れません。
上記のような障害は頻繁に発生するものではないと思いますが、クリティカルなシステムでは想定しておかないといけないですね。
AWSかオンプレミスか、最先端のAmazon AWS vs 自社システム部門… 明日はどっちだ!
参考:
2018年からAWS東京リージョンでもリージョン間VPCが可能になっていて、リージョン間クラスタの構築が可能だそうです(参考記事)。今回の障害発生時、リージョン間クラスタは機能したのでしょうか。
次に初期費用をシミュレーションしてみます。下表が、オンプレミス、AWS EC2、FileMaker Cloud 導入時に発生する諸費用となります。
当然ですが、オンプレミスは自前のサーバが必要となります。サーバが無い、あるいは既存のサーバに空きが無い場合、サーバを購入しなければなりません。
これに対し、AWS および FileMaker Cloud は、初期費用としてサーバ証明書と FileMaker 年間ライセンス費用のみとなるので、初期費用を抑えることができます。
| No. | オンプレミス (OP) |
AWS EC2 (AWS |
FileMaker Cloud(FMC) |
補足 | |
|---|---|---|---|---|---|
| 1 | サーバ証明書 (COMODO 企業認証タイプ SSL) |
¥27,864 | ¥27,864 | ¥27,864 | ・金額は消費税込み。
・FileMaker Cloud はComodo試用版SSL証明書が付属(90日)するが、90日以降の運用を想定して料金に追加 |
| 2 | FileMaker
Server 年間ライセンス費用 |
¥390,000 | ¥390,000 | ¥390,000 | |
| 3 | サーバ配置場所 |
自社
| AWS | AWS | |
| 4 | リージョン |
自社
|
東京 | 東京 | 「東京」のAWS正式呼称:Asia Pacific (Tokyo)。FileMaker Cloud の場合、アジアで選択できるリージョンは、東京とシドニーのみ |
| 5 | フルフィルメント・オプション |
―
|
AIM | AIM | AIM:Amazon Machine Image (64bit アーキテクチャ) |
| 6 |
サーバタイプ
(インスタンス種別)
|
―
|
EC2(t2.large)
|
EC2(t2.large)
|
|
| 7 |
HDD/EBS
(追加ストレージ)容量
|
1000GB
|
40GB
|
40GB
|
FileMaker Cloud は40GBがデフォルトで付属 |
| 8 |
メモリ
|
8GB
|
8GB
|
8GB
|
|
| 9 | コア数 | 2 | 2 | 2 | |
| 10 |
CPU
|
Intel Xeon
|
Intel Xeon
|
Intel Xeon
|
|
| 11 | クロック |
3.3GHz
|
3.3GHz
|
3.3GHz
|
|
| 12 | OS |
Win Svr 2016
|
Win Svr 2016
|
CentOS Linux
|
Win Svr 2016:Windows Server 2016 |
| 13 | サーバハードウェア初期費用 |
¥300,000
|
¥0
|
¥0
|
OPはUPS、バックアップ機器等のサブシステム費用を含まず |
| 初期費用計 | ¥717,864 | ¥417,864 | ¥417,864 | ||
- 金額は税抜き
- COMODO のFileMaker(ファイルメーカー)製品対応SSLについて
https://comodo.jp/support/dtl_67
年間ライセンスと永続ライセンスはどちらがお得なのか
同一バージョンの FileMaker Server を 3 年以上使する場合、永続ライセンス(買い切り)を購入したほうがコスト安となります。とういのは、FileMaker Server を 25ユーザで運用する場合、年間ライセンスは 39万円、これを 3年間使用し続けるとすると年間ライセンスは 117万円となり、この費用は永続ライセンスの金額と同額となるからです。
よって、3年以上を超えて長く運用すればするほど永続ライセンスがお得です。
なお、永続ライセンス自体は FileMaker Cloud で使用できない点にご注意ください。
最後に月々の運用コストを比較してみましょう。
| No. | セットアップ項目 | オンプレミス (OP) |
AWS EC2 (AWS) |
FileMaker Cloud(FMC) | 補足 |
|---|---|---|---|---|---|
| 1 | 1日の稼働時間(H) |
24
|
24
|
24
|
|
| 2 | 消費電力(W) |
400
|
400
|
400
|
ラックマウントサーバ Dell R330 相当の消費電力 |
| 3 |
30日分の消費電力(kW)
|
288
|
288
|
288
|
400W X 24H X 30日÷1000 として計算 |
| 4 | 電力単価*2 |
¥17.60
|
―
|
―
|
東京電力の料金(夏季) AWS/FileMaker Cloud は電力請求なし |
| 5 | 電気代 |
¥5,068.80
|
―
|
―
|
AWS/FileMaker Cloud は電力請求なし |
| 6 | AWS の時間単価 |
―
|
$0.13 | EC2(t2.large) | |
| 7 |
FileMaker Cloud の時間単価
|
―
|
―
|
$0.117 | EC2(t2.large) |
| 8 | 30日分の料金 |
―
|
$93.60 | $84.240 | 24H × 30日 × 上記時間単価(割引適用無し) |
| 9 | 9 AWSのストレージ料金(40GB) |
―
|
$4.80 | 料金に含む | FileMaker
Cloud で割り当てられる EBS (40GB) 目安 |
| 10 | アウトバウンド転送料金 (50GB) | ¥0 | $6.86 | $6.86 | 保守用のデータ転送として 50GB を想定 |
| 11 | AWS/FileMaker Cloud 料金合計 |
―
|
$105.26 | $91.10 | |
| 12 | 米国ドル為替レート (2018/08/29 時点) |
―
|
¥111.15
|
¥111.15
|
|
| 運用費用月額計*1 |
¥5,069
|
¥11,700 | ¥10,126 | *OPは高負荷状態を想定、冷却空調費用含まず | |
FileMaker Cloud の申し込みの柔軟性について
FileMaker Cloud のライセンスは、 BYOL(既存のライセンスの持ち込み) とマーケットプレース(5/10/25/100ユーザライセンス)での購入に分類できます。請求に関しては hourly(時間請求) と annual(年間請求)という分類になります。
一見、簡単なようにみえますが、以下のようなことを考慮する必要があります。
- FileMaker Server の永続ライセンスは使用できない。但し、永続ライセンスを年間ライセンスに変換すれば Cloudでの使用が可能。
永続ライセンスを年間ライセンスに変換し、FileMaker Cloud に適用するまでの手順が公式動画で紹介されています。 - BYOL はリザーブド・インスタンス(インスタンスの年間契約)を選択できないため、hourly (時間請求)の一択になる。
- BYOL を使用しない場合、hourly(時間請求)または annual (年間請求)を選択できるが、ユーザ数の区切りが 5ユーザ、10 ユーザ、25 ユーザ、100 ユーザの 4 択になる。同時アクセスユーザ数が 30 など、中途半端になる場合はコスト高になる可能性がある。
- annual を選択すると途中解約やダウングレードができない。この件に関するサポートやアップグレードの要望がある場合は要問合せ(英語)。
参考:BYOL to a reserved instance on FileMaker Cloud (英語)
スレッド内でも言及されていますが、あらかじめ AWS でリザーブド・インスタンスを購入しておいて、後で FileMaker Cloud の BYOL に結びつけるという裏技もあるようです。ただし公式対応ではないため、微妙です。
参考:Using an AWS Reserved Instance with FileMaker Cloud (英語)
まとめ
すでに社内に仮想環境があるのであれば、仮想マシンを一つ作成するだけで FileMaker Server 環境を構築できますので、FileMaker Cloud の必要性は低いと思います。これはAWS 等のクラウドを運用中の企業でも同様です。社内にサーバ技術者がいない、いろいろ考えず手っ取り早く FileMaker を試用したいといった場合には、 FileMaker Cloud が威力を発揮すると思います。ただ、FileMaker AWS への登録、キーペアの作成、FileMaker Cloud 申し込み、FileMaker Cloud へのキーペア紐づけ等の設定は最低限必要になるのでご留意ください。
■ FileMaker Cloud 関連情報(随時更新)
FileMaker Cloud のチュートリアル(18/09/04追記)
FileMaker Cloud スターティングガイド(18/09/04追記)
FileMaker Cloud Support ページ [英語](18/09/03追記)
FileMaker Cloud に関するサポート情報がコンパクトに表形式でまとめられています。
FileMaker Cloud スターティングガイド(18/09/04追記)
FileMaker Cloud Support ページ [英語](18/09/03追記)
FileMaker Cloud に関するサポート情報がコンパクトに表形式でまとめられています。
参考リンク:
*本稿執筆にあたり、以下を参考にしています。
FileMaker ServerとFileMaker Cloudの比較 [公式サイト]
FileMaker Cloud 技術仕様 [公式サイト]
ファイルメーカー、「FileMaker Cloud」の日本リリースを発表 [公式サイト]
料金単価表‐電力(従来からの料金プラン) [東京電力]